Last updated on 2020年6月3日
前回の機体はライントレースにフォトリフレクタを使っていたのですが、それでは誤差が大きいということがわかったので今回は、光変調型フォトICを使ってみます。
このS7136は日光や照明などの外乱光による誤作動を防ぐ回路が内蔵されています。仕組みは最近Twitterで技術的なことなどを教えていただいている蟹さんがわかりやすく説明しています。
https://twitter.com/Blueberry_Pi_/status/772022582597922816
実際使用した際も凄く精度が高いと感じました。
必要なもの
| 部品名 | 個数 | 今回の購入場所 |
| フォトIC S7136 | 1 | 秋月電子 |
| 赤外線LED OSI5FU5111C-40 | 1 | 秋月電子 |
| 低電流赤色LED | 1 | 秋月など |
| 半固定抵抗器5kΩ | 1 | 秋月など |
| 自作変換基板用 | ||
| 薄型基板 | 適宜 | (あれば) |
| ピンヘッダ | 適宜 |
作り方
まず、このフォトICはブレッドボードに刺さりません。

そこで私はまず変換基板を自作しました。
秋月などにも極薄基板が売っているのでそれを使うと簡単に基板を加工できます。
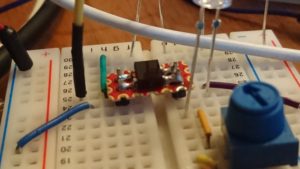
僕はこんな感じに出来ました。
S7136のピン番号はデータシートを見ると足の短いピンが4番ピンとなります。
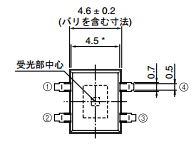
| 1 | カソード(LED) |
| 2 | Vcc |
| 3 | Vout |
| 4 | GND(短リード) |
回路
回路は、マイコンカーラリーの回路図をそのままパクりました。手っ取り早いので、、。日立のマイコンカーラリーのダウンロードページからダウンロードできます。センサ基板Ver.5 製作マニュアル第2.04版をダウンロードすると、回路図が見れます。念のためにこちらにも、ミラー版として転載します。勿論無許可ですすみません。
ダウンロード:sensor5_seisaku.pdf
そこの回路図をみて作りました。


こんな感じの回路図です。
組上がるとこんな感じです。

プログラム
実際コーディングしなくても先程の回路で5V繋げばLEDで動作確認できます。
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorValue = digitalRead(28);//ここはつないだピン
Serial.print(sensorValue);
delay(100);
}
プログラムはこんな感じです。ただデジタル入力読み取ってシリアル通信に流してるだけです。
調整
まずツマミを回してLEDが点灯するのを確認します。ここで点かなかったから回路をもう一度確認してください。逆方向にツマミを回すとLEDが消灯されます。その状態でセンサのまえに手をかざすとLEDが点灯するはずです。
実際に動かすとこんなような感じで動きます。
よさげに動いてくれました。
これをひとつの基板に沢山実装すればラインとレース基板が作れます。


こんな感じの物できました。
これでライントレースもバッチリ✌(ではない)
どうでも良いけど記事書くの時間かかる。。これ過去始めたの9月なのに。。もっと素早く記事書ける方法を模索中です。。
[…] ロボット関係では、デフォルトセンサらしいのですが、説明が丁寧なブログがなかなかなくて、以下のブログ見て実験しました。管理人さんには感謝です。 http://mononichi.com/2016/12/howtos7136/ […]
[…] http://mononichi.com/2016/12/howtos7136/ […]